算法与数据结构
树
二叉树 Binary tree
If every non-leaf node in a binary tree has nonempty left and right subtrees, the tree is termed a strictly binary tree. Or, to put it another way, all of the nodes in a strictly binary tree are of degree zero or two, never degree one.
- 严格二叉树 Strictly binary tree (full binary tree)
1 | 18 |
- 完整二叉树 Complete binary tree
A complete binary tree is a binary tree in which every level, except possibly the last, is completely filled, and all nodes are as far left as possible.
1 | 18 |
二叉树遍历:
- 前序遍历 preorder:先访问根节点 —— 前序遍历左子树 —— 前序遍历右子树 (中左右)
- 中序遍历 inorder:先访问左子树 —— 根节点 —— 右子树(左中右)
- 后序遍历 postorder:先访问树的左子树 —— 右子树 —— 根节点(左右中)
同样的遍历序列可能对应多棵不同的树
二叉搜索树 Binary Search Tree (BST)
若它的左子树不空,则左子树上所有结点的值均小于它的根结点的值; 若它的右子树不空,则右子树上所有结点的值均大于它的根结点的值; 它的左、右子树也分别为二叉排序树。
搜索平均时间: Θ(logn):The expected height of the tree is logn
最坏情况: Θ(n):The tree is a linear chain of n nodes
| Operations | Time |
|---|---|
| SEARCH | O(h) |
| PREDECESSOR | O(h) |
| SUCCESOR | O(h) |
| MINIMUM | O(h) |
| MAXIMUM | O(h) |
| INSERT | O(h) |
| DELETE | O(h) |
h 是树的高度,因此,树越高,操作时间越长;树越矮,操作时间越短。
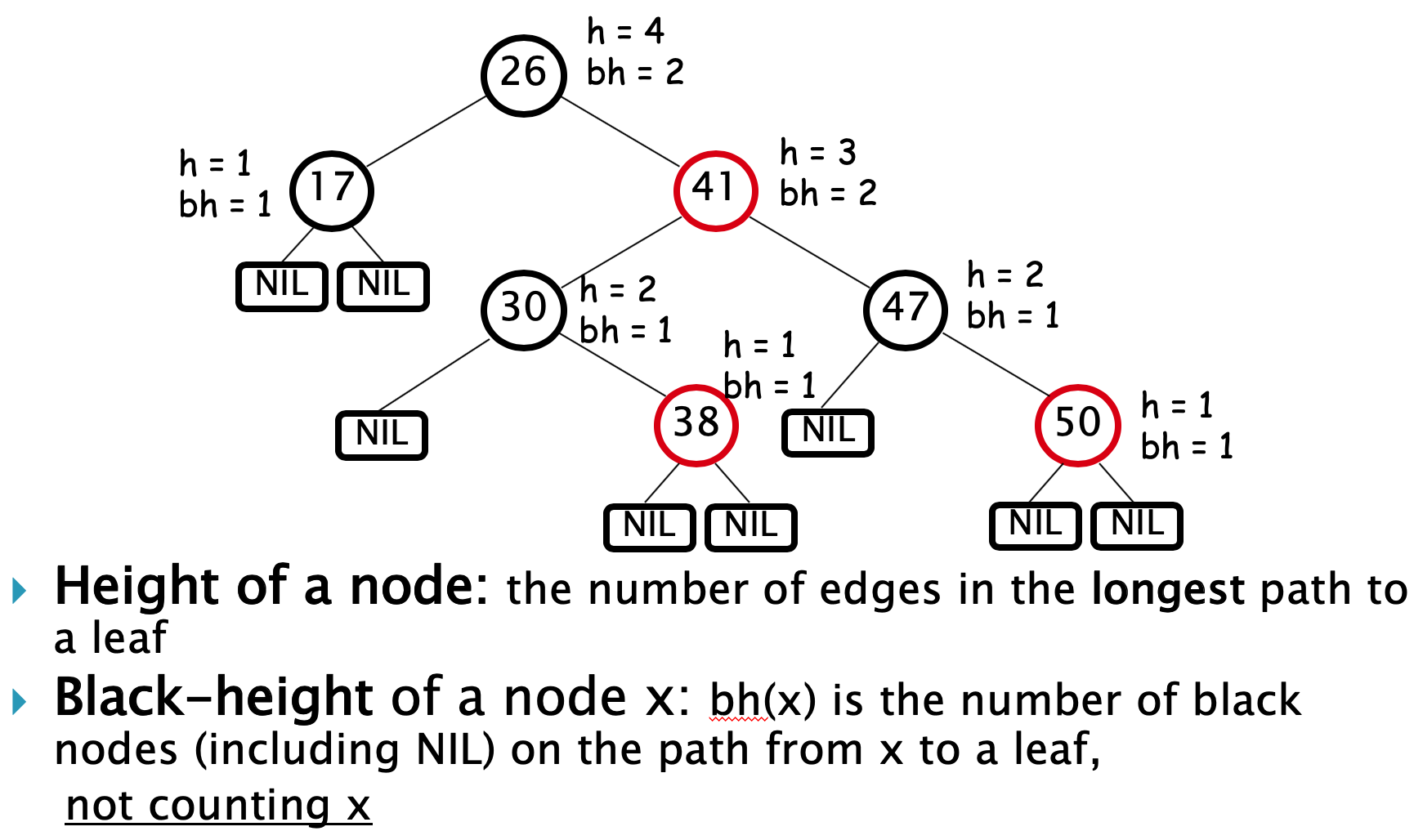
红黑树
属性:
- 节点是红色或黑色。
- 根节点是黑色。
- 每个叶子节点都是黑色的空节点(NIL节点)。
- 每个红色节点的两个子节点都是黑色。(从每个叶子到根的所有路径上不能有两个连续的红色节点)
- 从任一节点到其每个叶子的所有路径都包含相同数目的黑色节点。
- (是二叉搜索树)
性质:
- n 个 node 的红黑树的高度最大为
2log(n + 1)- 任何 node x 的高度 h(x) 有:
bh(x) ≥ h(x)/2 - 以 x 为 root 的子树包含至少
2^(bh(x)) - 1个内部 node
- 任何 node x 的高度 h(x) 有:
- 从根到叶子的最长路径不会超过最短路径的 2 倍
操作时间复杂度
| Operations | Time |
|---|---|
| SEARCH | O(logn) |
| PREDECESSOR | O(logn) |
| SUCCESOR | O(logn) |
| MINIMUM | O(logn) |
| MAXIMUM | O(logn) |
| INSERT | O(logn) |
| DELETE | O(logn) |
左旋与右旋
AVL 树
属性:
- (是二叉搜索树)
- 每个节点的左子树和右子树的高度差最多为 1
红黑树 Vs AVL树
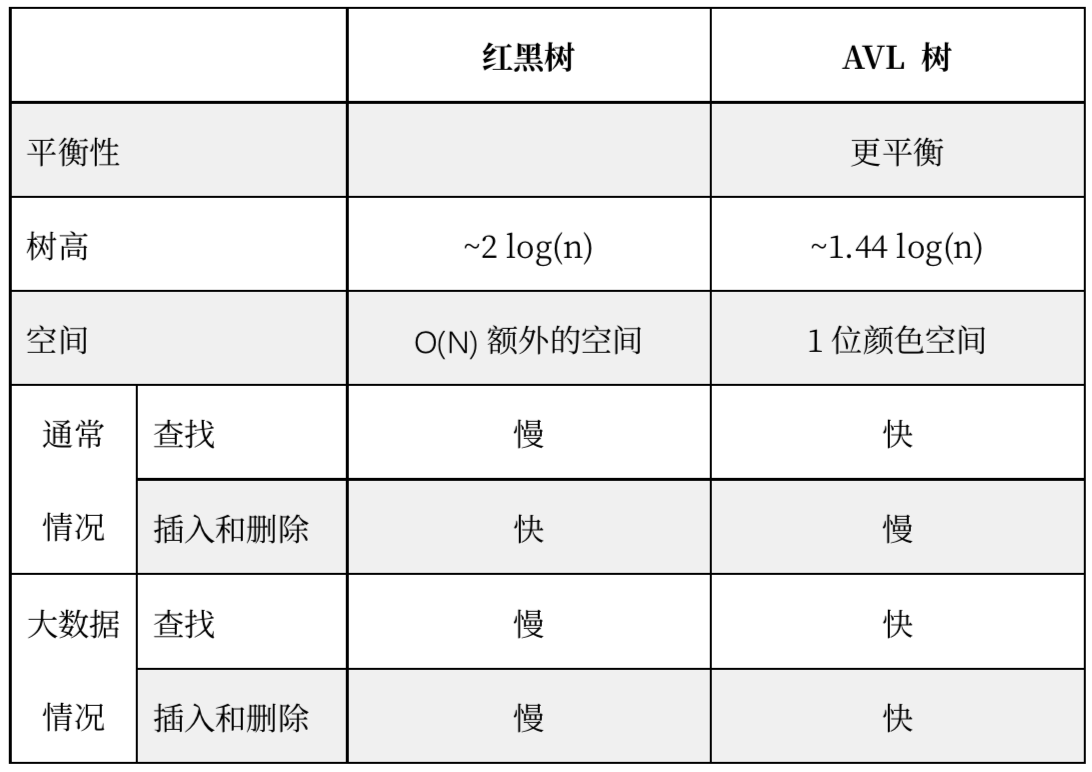
- AVL 树中的查找通常更快,但这是以插入和删除速度慢为代价的,因为需要更多的旋转操作。因此,如果您希望查找的重要性大于的更新的重要性,则使用AVL树。
- 在大多数语言库中都使用红黑树,如 C++ 中的 map、MultIAP、MultiSet 等,而 AVL 树则用于数据库中,因为需要更快的检索。
- 大数据的情况,因为在插入之前需要查找特定节点。AVL 树和 RB 树在最坏的情况下仍然只需要固定的旋转次数。因此,瓶颈是查找该特定节。
B 树
磁盘IO与预读
磁盘读取依靠的是机械运动,分为寻道时间、旋转延迟、传输时间三个部分,这三个部分耗时相加就是一次磁盘IO的时间,大概9ms左右(需要等待一个磁盘转完完整的一圈)。这个成本是访问内存的十万倍左右;正是由于磁盘IO是非常昂贵的操作,所以计算机操作系统对此做了优化:预读;每一次IO时,不仅仅把当前磁盘地址的数据加载到内存,同时也把相邻数据也加载到内存缓冲区中。因为局部预读原理说明:当访问一个地址数据的时候,与其相邻的数据很快也会被访问到。每次磁盘IO读取的数据我们称之为一页(page)。一页的大小与操作系统有关,一般为4k或者8k。这也就意味着读取一页内数据的时候,实际上发生了一次磁盘IO。
当搜索表保存在磁盘上时,每次磁盘传输的成本很高,但并不很大程度上取决于传输的数据量,特别是如果传输的是连续的项目。
B-Tree与二叉查找树的对比
我们知道二叉查找树查询的时间复杂度是O(logN),查找速度最快和比较次数最少,既然性能已经如此优秀,但为什么实现索引是使用B-Tree而不是二叉查找树,关键因素是磁盘IO的次数。
数据库索引是存储在磁盘上,当表中的数据量比较大时,索引的大小也跟着增长,达到几个G甚至更多。当我们利用索引进行查询的时候,不可能把索引全部加载到内存中,只能逐一加载每个磁盘页,这里的磁盘页就对应索引树的节点。
二叉树
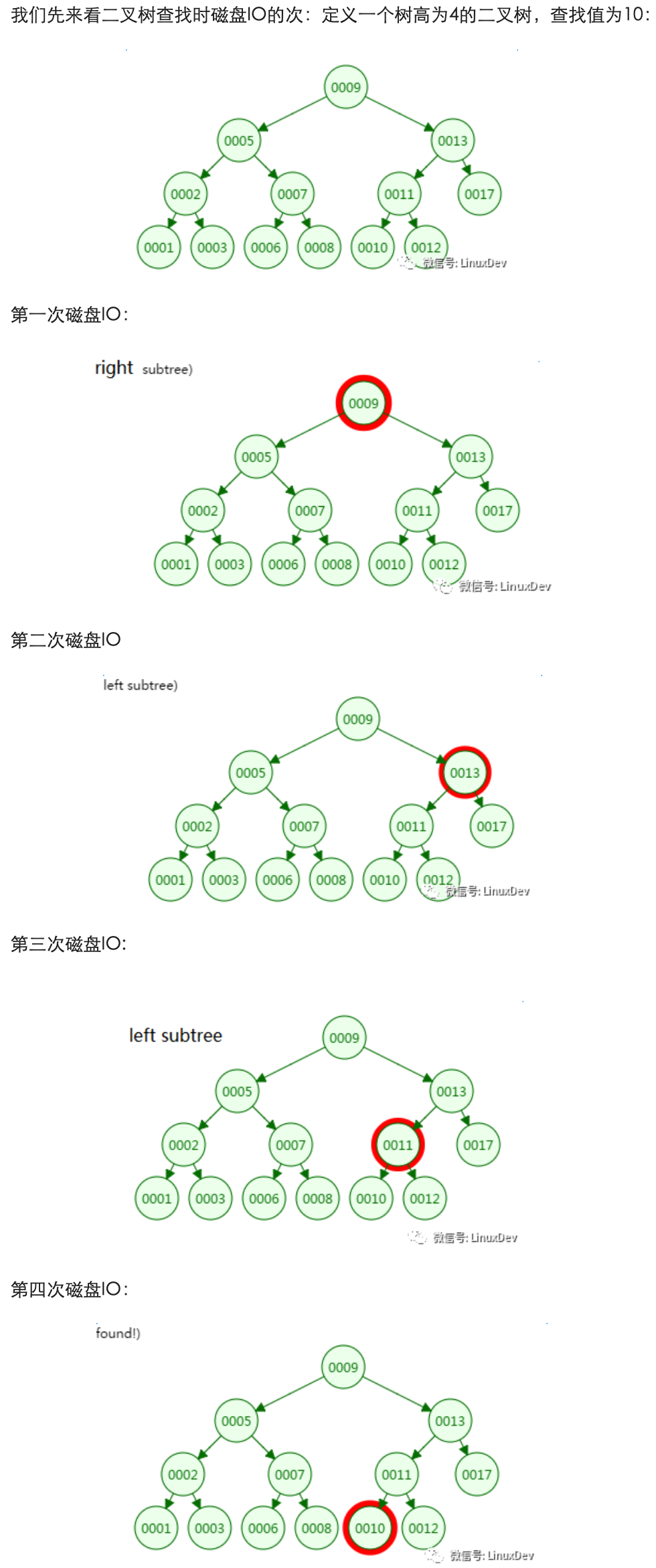
从二叉树的查找过程了来看,树的高度和磁盘IO的次数都是4,所以最坏的情况下磁盘IO的次数由树的高度来决定。
从前面分析情况来看,减少磁盘IO的次数就必须要压缩树的高度,让瘦高的树尽量变成矮胖的树,所以B-Tree就在这样伟大的时代背景下诞生了。
B-Tree
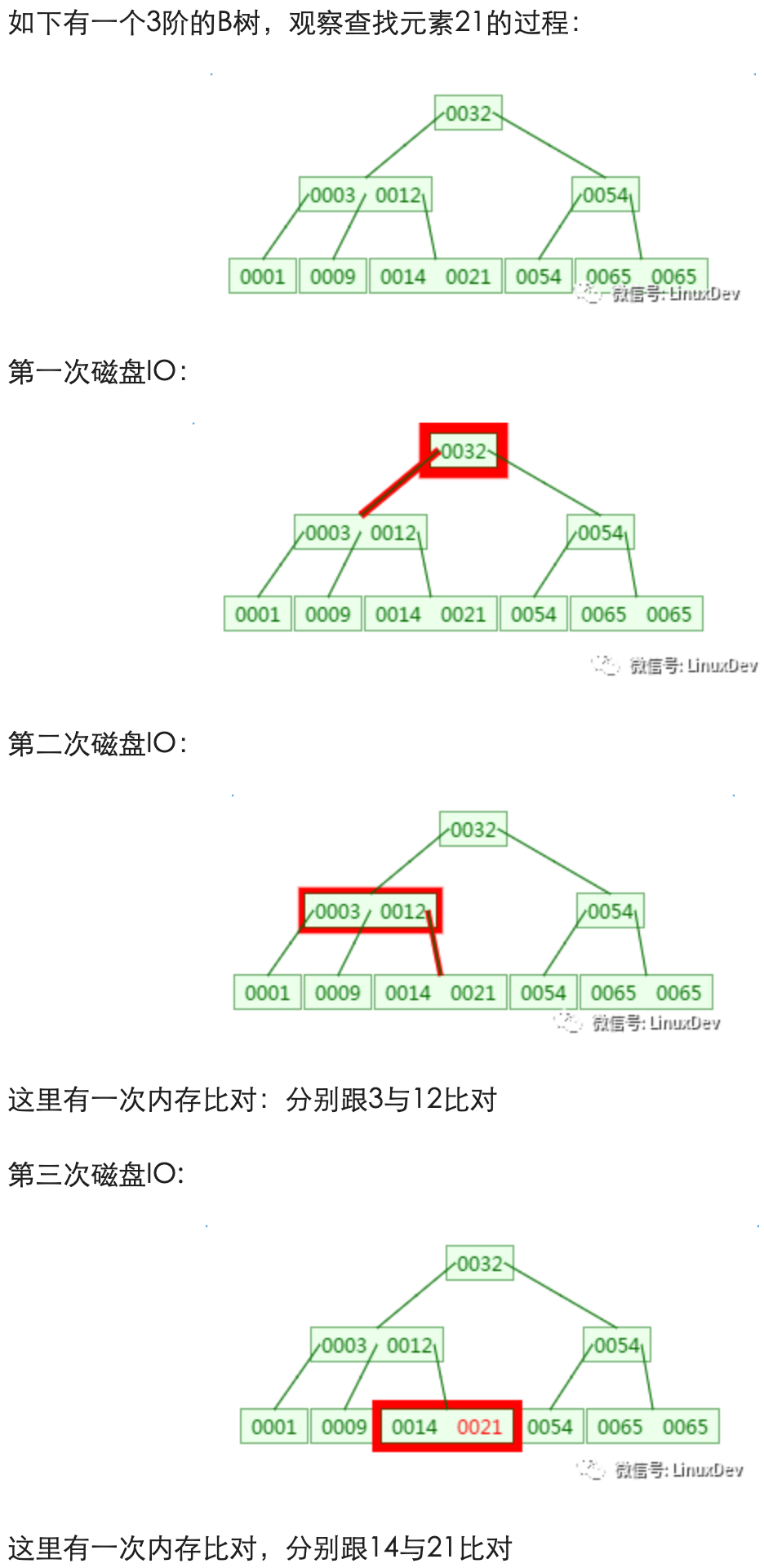
从查找过程中发现,B树的比对次数和磁盘IO的次数与二叉树相差不了多少,所以这样看来并没有什么优势。
但是仔细一看会发现,比对是在内存中完成中,不涉及到磁盘IO,耗时可以忽略不计。另外B树种一个节点中可以存放很多的key(个数由树阶决定)。
相同数量的key在B树中生成的节点要远远少于二叉树中的节点,相差的节点数量就等同于磁盘IO的次数。这样到达一定数量后,性能的差异就显现出来了。
B树主要应用于文件系统以及部分数据库索引,如MongoDB,大部分关系型数据库索引则是使用B+树实现。
规则:
- 排序方式:所有节点关键字是按递增次序排列,并遵循左小右大原则;
- 非叶节点的 key 数比它的子树的数量小 1;
- 子节点数:非叶节点(除了 root)的子节点数为,
[ceil(M/2), M];root 要么是一个叶节点,要么有[2, m]个子节点; - key 数:除了 root 所有 node 的 key 数量为
[ceil(M/2) - 1, M-1]; - 所有叶子节点均在同一层,叶节点包含不超过
M - 1个 key。
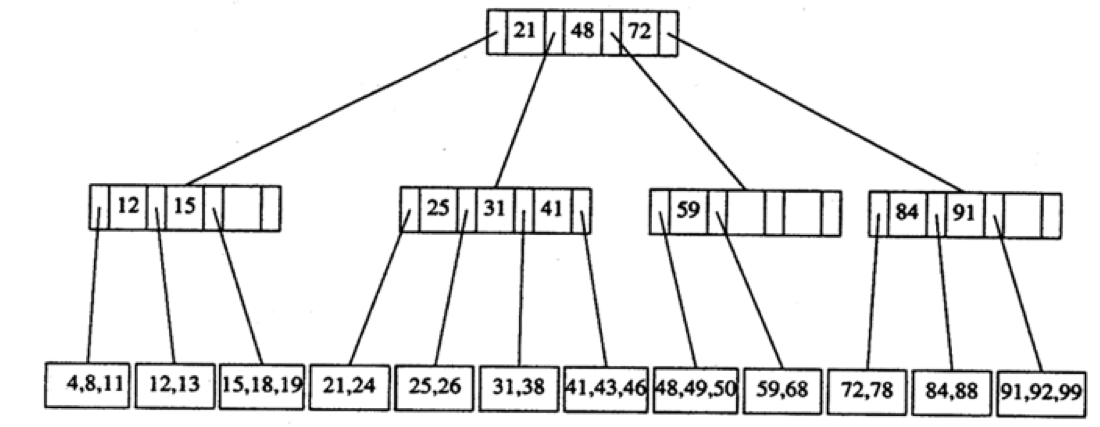
B-tree of order 4:
图
入度 in-degree:进入该节点的边的条数
出度 out-degree:从该节点出发的边的条数
连通图
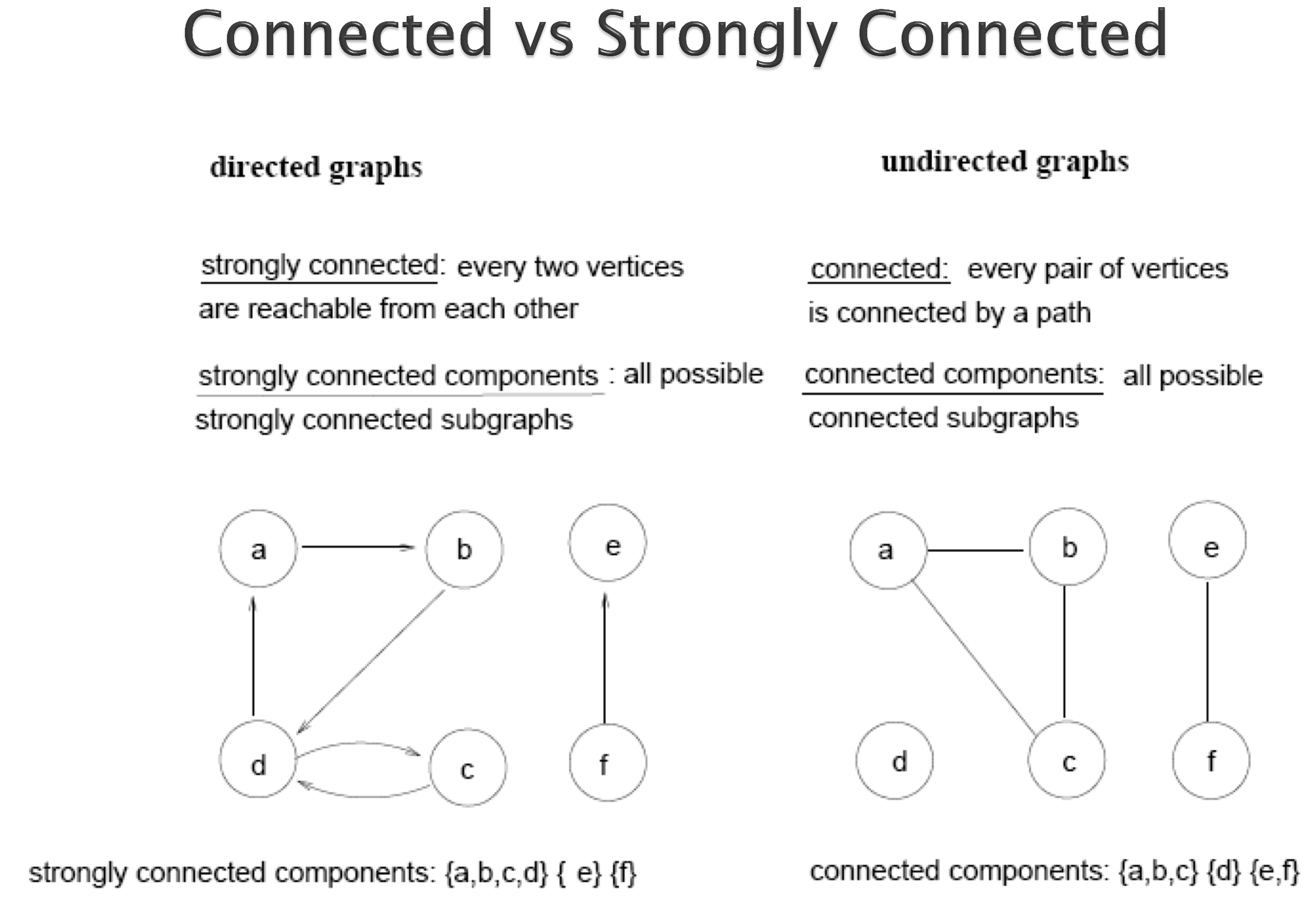
A tree is a connected, acyclic “undirected” graph
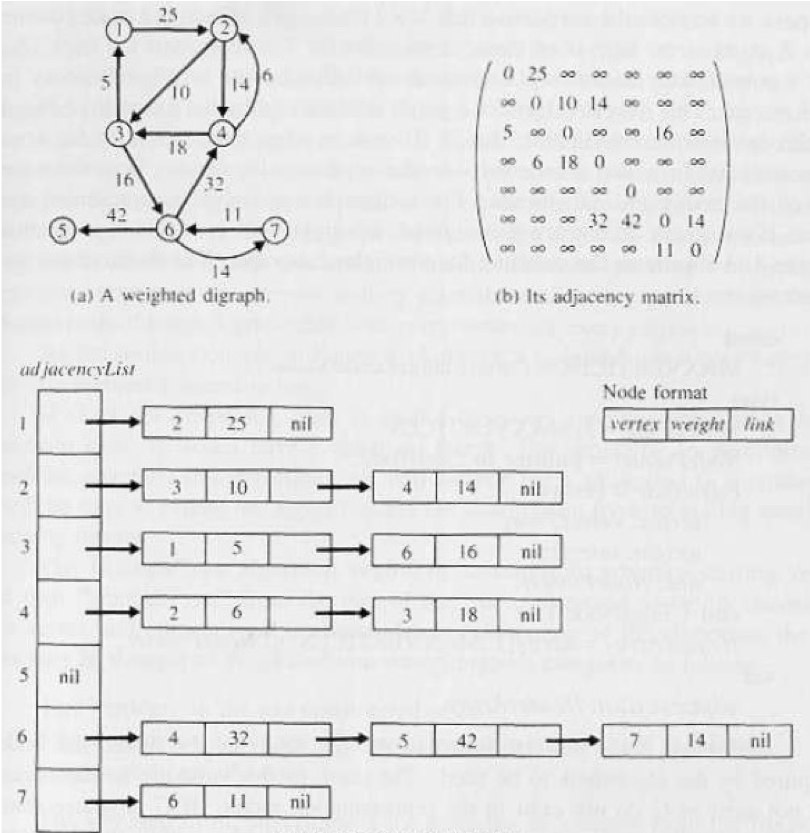
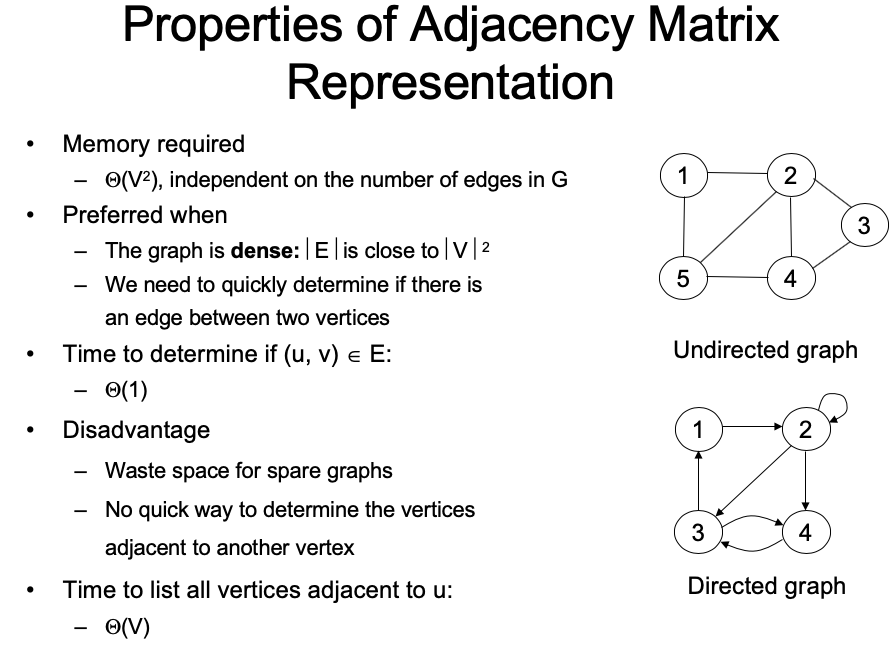
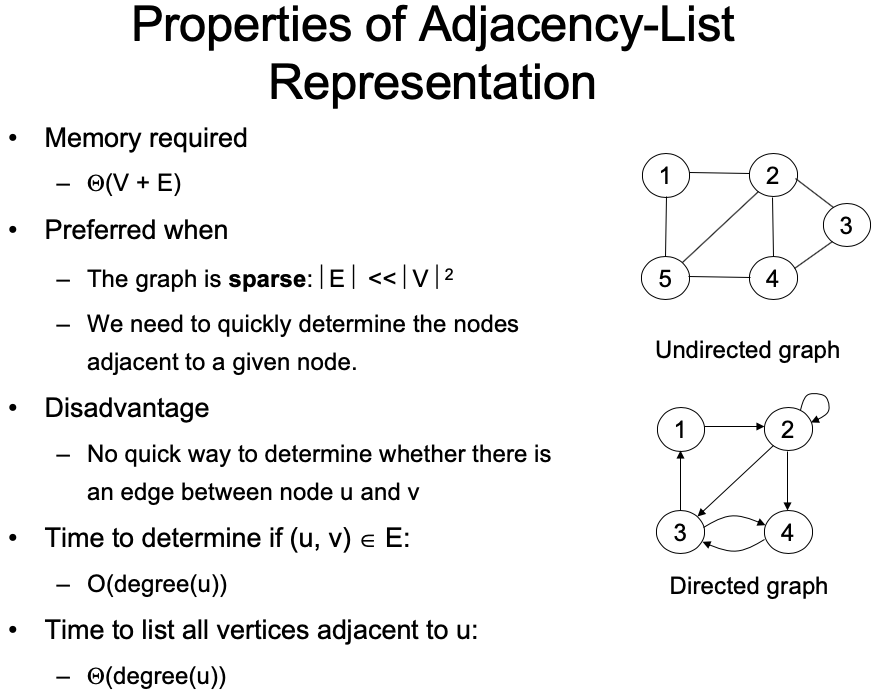
邻接表与邻接矩阵
拓扑排序 Topological sort
有向无环图(DAG)至少有一种拓扑排序,非 DAG 图没有拓扑排序。
当有向无环图满足以下条件时:
- 每一个顶点出现且只出现一次
- 若A在序列中排在B的前面,则在图中不存在从B到A的路径。
我们称这样的图,是一个拓扑排序的图。
与之前的树结构对比不难发现,树结构其实可以转化为拓扑排序,而拓扑排序 不一定能够转化为树。
算法:
- 根据邻接矩阵或邻接表计算入度数组
- 取入度为 0 的 vertex
- 打印该 vertex,并移除它,和它的 edge
- 判断减小后是否有新的入度为 0 的 vertex,继续进行第2步
- 直到所有 vertex 入度为 0、得到拓扑排序序列,或返回失败
Running time is
O(|V|^2).
1 | void topsort () { |
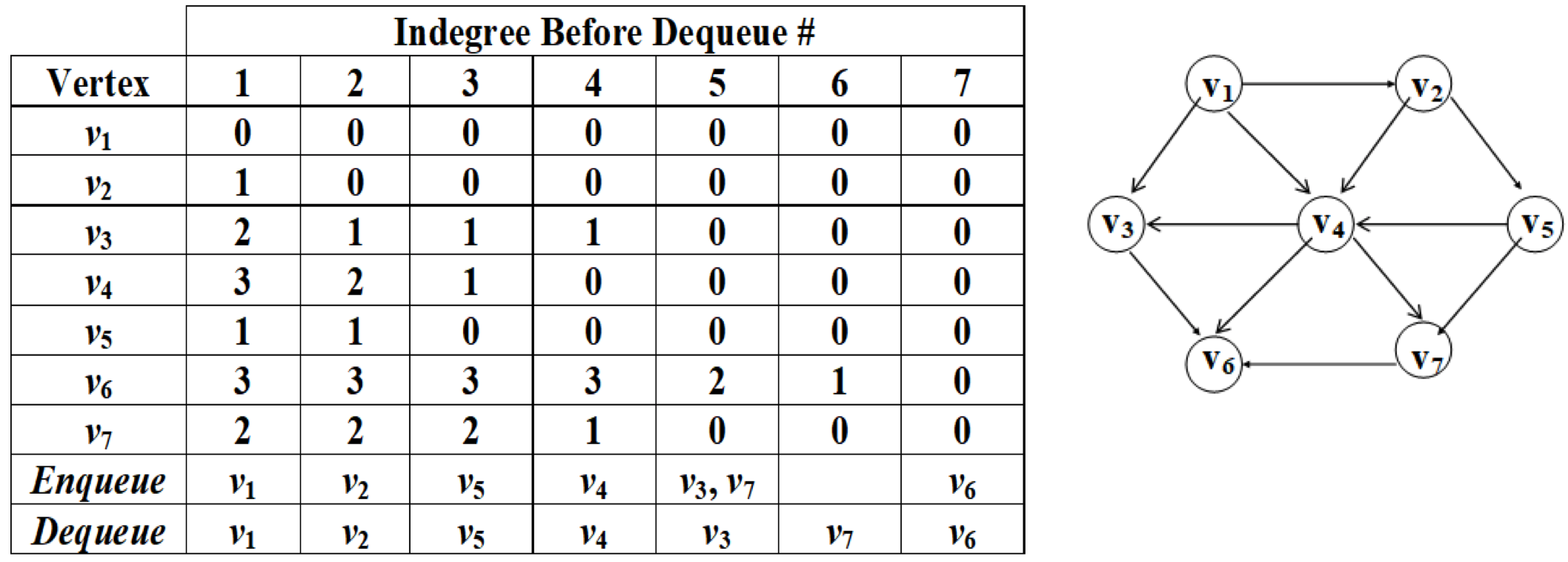
改进版本:
- 将 indegree 0的所有未分配顶点保留在队列中。
- 当队列不为空:
- 在队列中删除一个顶点。
- 减小所有相邻顶点的度数。
- 如果相邻顶点的度数变为0,则使该顶点入队。
运行时间为
O(| E | + | V |)。
最短路径
单源点的最短路径问题是指:
给定一个加权有向图 G 和源点 s,对于图 G 中的任意一点 v,求从 s 到 v 的最短路径。
Dijkstra 算法
Bellman-Ford 算法
- APP: 算法动画图解
两种算法的区别:
bellman-ford
- bellman-ford的一个优势是可以用来判断是否存在负环
求单源最短路,可以判断有无负权回路(若有,则不存在最短路),时效性较好,时间复杂度O(VE)。Bellman-Ford算法是求解单源最短路径问题的一种算法。
求单源、无负权的最短路。时效性较好,时间复杂度为O(VV+E)。源点可达的话,O(VlgV+ElgV)=>O(ElgV)。
最小生成树
- MST 不是唯一的
- MST 没有 cycle
- MST 的 edge 的数量:
|V| - 1
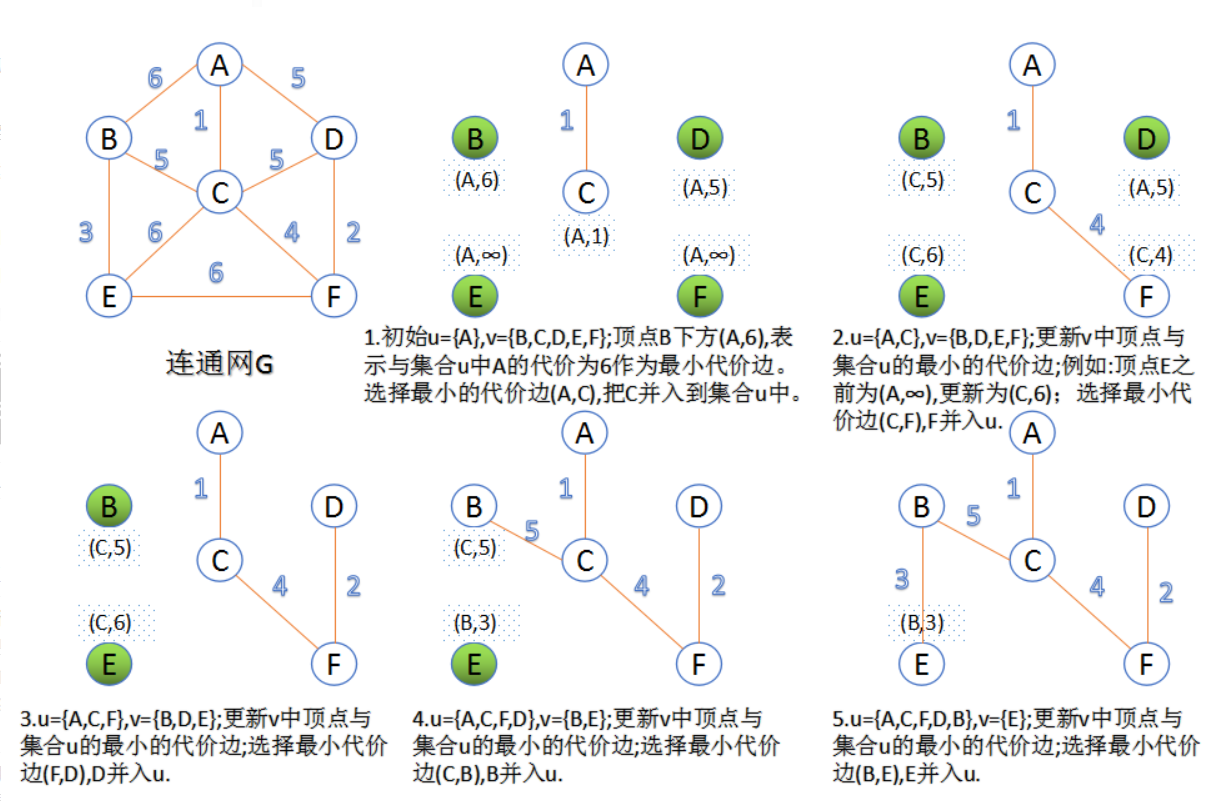
Prim 算法
首先以一个结点作为最小生成树的初始结点,然后以迭代的方式找出与最小生成树中各结点权重最小边,并加入到最小生成树中。加入之后如果产生回路则跳过这条边,选择下一个结点。当所有结点都加入到最小生成树中之后,就找出了连通图中的最小生成树了。
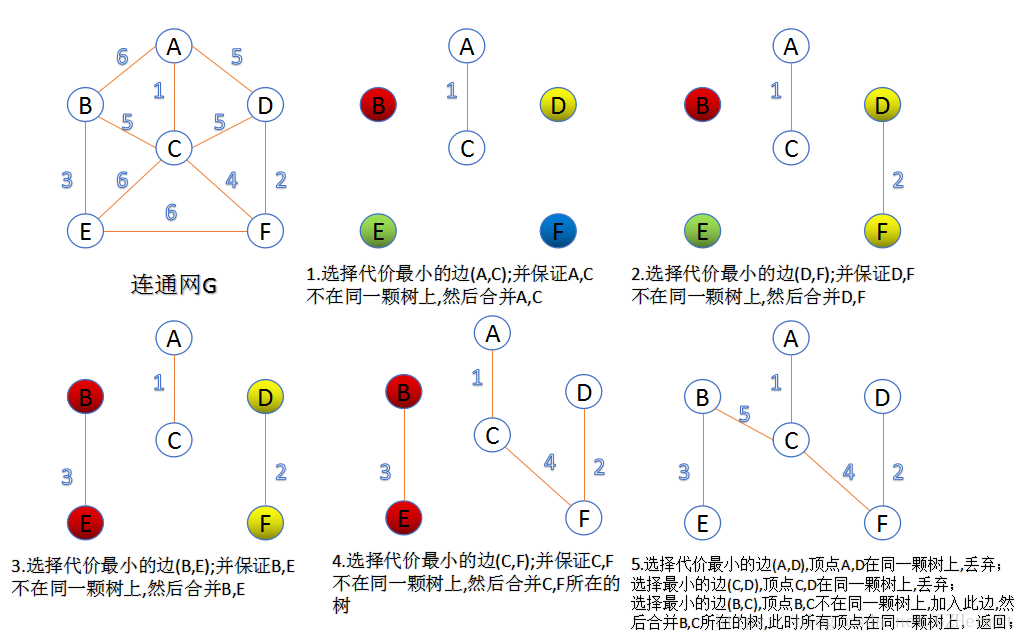
Kruskal 算法
Kruskal算法与Prim算法的不同之处在于,Kruskal在找最小生成树结点之前,需要对所有权重边做从小到大排序。将排序好的权重边依次加入到最小生成树中,如果加入时产生回路就跳过这条边,加入下一条边。当所有结点都加入到最小生成树中之后,就找出了最小生成树。
Prim Vs Kruskal
- 两者都可以处理负权重
- One begins with an edge while the other starts with a node.
- One selects the next edge in order while the other does it from one node to another node.
- One works on both connected and disconnected graphs while the other is mainly for connected graph.
- One is good for sparse graph and the other is for dense graph.
- Depending on the implementation of data structure.
prim: 该算法的时间复杂度为O(n2)。与图中边数无关,该算法适合于稠密图。
kruskal: 需要对图的边进行访问,所以克鲁斯卡尔算法的时间复杂度只和边又关系,可以证明其时间复杂度为O(eloge)。适合稀疏图。
无疑,Kruskal算法在效率上要比Prim算法快,因为Kruskal只需要对权重边做一次排序,而Prim算法则需要做多次排序。尽管Prim算法每次做的算法涉及的权重边不一定会涵盖连通图中的所有边,但是随着所使用的排序算法的效率的提高,Kruskal算法和Prim算法之间的差异将会清晰的显性出来。
时间上:Prim适合稠密图,复杂度为O(n * n),因此通常使用邻接矩阵储存,复杂度为O(e * loge),而Kruskal多用邻接表。
稠密图 Prim > Kruskal,稀疏图 Kruskal > Prim。
空间上: Prim适合点少边多,Kruskal适合边多点少。
动态规划
采用动态规划时,并不需要去一一计算那些重叠了的子问题。
或者说:用了动态规划之后,有些子问题 是通过 “查表” 直接得到的,而不是重新又计算一遍得到的。
最优子结构
问题的最优解包含子问题的最优解
从子问题的最优解自下而上建立整个问题的最优解重叠子问题
如果递归算法一遍又一遍地重新访问相同的子问题,则该问题具有重叠的子问题
DP算法的运行时间取决于两个因素:
子问题总数
每个子问题有多少选择
Θ(n) 个子问题
每个子问题有 2 个选择
————> Θ(n)Θ(n^2) 个子问题
约有 n-1 个选择
————> Θ(n^3)