PyTorch Cookbook(常用代码段整理合集)
PyTorch 大批量数据在单个或多个 GPU 训练指南
PyTorch中在反向传播前为什么要手动将梯度清零?
基础 Numpy to Torth
python、PyTorch 图像读取与 numpy 转换
Torch 自称为神经网络界的 Numpy, 因为他能将 torch 产生的 tensor 放在 GPU 中加速运算 (前提是你有合适的 GPU), 就像 Numpy 会把 array 放在 CPU 中加速运算. 所以神经网络的话, 当然是用 Torch 的 tensor 形式数据最好咯. 就像 Tensorflow 当中的 tensor 一样.
当然, 我们对 Numpy 还是爱不释手的, 因为我们太习惯 numpy 的形式了. 不过 torch 看出来我们的喜爱, 他把 torch 做的和 numpy 能很好的兼容. 比如这样就能自由地转换 numpy array 和 torch tensor 了:
1 2 3 4 5 6 7 8 9 10 11 import torchimport numpy as npnp_data = np.arange(6 ).reshape((2 , 3 )) torch_data = torch.from_numpy(np_data) tensor2array = torch_data.numpy() print( '\nnumpy array:' , np_data, '\ntorch tensor:' , torch_data, '\ntensor to array:' , tensor2array, )
数学运算 其实 torch 中 tensor 的运算和 numpy array 的如出一辙, 我们就以对比的形式来看. 如果想了解 torch 中其它更多有用的运算符, API 就是你要去的地方
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 data = [-1 , -2 , 1 , 2 ] tensor = torch.FloatTensor(data) print( '\nabs' , '\nnumpy: ' , np.abs(data), '\ntorch: ' , torch.abs(tensor) ) print( '\nsin' , '\nnumpy: ' , np.sin(data), '\ntorch: ' , torch.sin(tensor) ) print( '\nmean' , '\nnumpy: ' , np.mean(data), '\ntorch: ' , torch.mean(tensor) )
除了简单的计算, 矩阵运算才是神经网络中最重要的部分. 所以我们展示下矩阵的乘法. 注意一下包含了一个 numpy 中可行, 但是 torch 中不可行的方式
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 data = [[1 ,2 ], [3 ,4 ]] tensor = torch.FloatTensor(data) print( '\nmatrix multiplication (matmul)' , '\nnumpy: ' , np.matmul(data, data), '\ntorch: ' , torch.mm(tensor, tensor) ) data = np.array(data) print( '\nmatrix multiplication (dot)' , '\nnumpy: ' , data.dot(data), '\ntorch: ' , tensor.dot(tensor) )
新版本中(>=0.3.0), 关于 tensor.dot() 有了新的改变, 它只能针对于一维的数组. 所以上面的有所改变
1 2 3 4 tensor.dot(tensor) torch.dot(tensor.dot(tensor)
Variable 在 Torch 中的 Variable 就是一个存放会变化的值的地理位置. 里面的值会不停的变化. 就像一个裝鸡蛋的篮子, 鸡蛋数会不停变动. 那谁是里面的鸡蛋呢, 自然就是 Torch 的 Tensor 咯. 如果用一个 Variable 进行计算, 那返回的也是一个同类型的 Variable.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 import torchfrom torch.autograd import Variable tensor = torch.FloatTensor([[1 ,2 ],[3 ,4 ]]) variable = Variable(tensor, requires_grad=True ) print(tensor) """ 1 2 3 4 [torch.FloatTensor of size 2x2] """ print(variable) """ Variable containing: 1 2 3 4 [torch.FloatTensor of size 2x2] """
获取 Variable 里面的数据
直接 print(variable) 只会输出 Variable 形式的数据, 在很多时候是用不了的(比如想要用 plt 画图), 所以我们要转换一下, 将它变成 tensor 形式.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 print(variable) """ Variable containing: 1 2 3 4 [torch.FloatTensor of size 2x2] """ print(variable.data) """ 1 2 3 4 [torch.FloatTensor of size 2x2] """ print(variable.data.numpy()) """ [[ 1. 2.] [ 3. 4.]] """
激励函数 导入模块
1 2 3 import torchimport torch.nn.functional as F from torch.autograd import Variable
做一些假数据来观看图像
1 2 3 x = torch.linspace(-5 , 5 , 200 ) x = Variable(x) x_np = x.data.numpy()
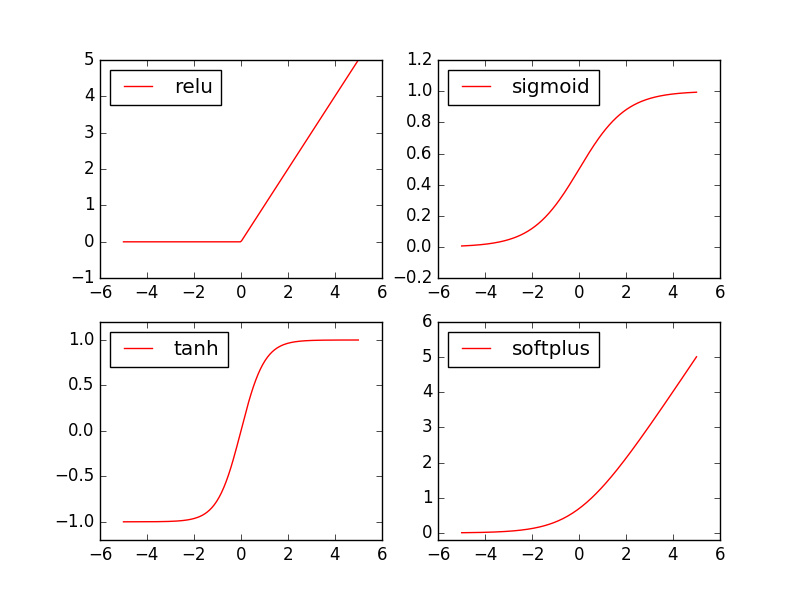
不同的激励函数
1 2 3 4 5 6 y_relu = F.relu(x).data.numpy() y_sigmoid = F.sigmoid(x).data.numpy() y_tanh = F.tanh(x).data.numpy() y_softplus = F.softplus(x).data.numpy()
观察图像
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 import matplotlib.pyplot as plt plt.figure(1 , figsize=(8 , 6 )) plt.subplot(221 ) plt.plot(x_np, y_relu, c='red' , label='relu' ) plt.ylim((-1 , 5 )) plt.legend(loc='best' ) plt.subplot(222 ) plt.plot(x_np, y_sigmoid, c='red' , label='sigmoid' ) plt.ylim((-0.2 , 1.2 )) plt.legend(loc='best' ) plt.subplot(223 ) plt.plot(x_np, y_tanh, c='red' , label='tanh' ) plt.ylim((-1.2 , 1.2 )) plt.legend(loc='best' ) plt.subplot(224 ) plt.plot(x_np, y_softplus, c='red' , label='softplus' ) plt.ylim((-0.2 , 6 )) plt.legend(loc='best' ) plt.show()
数据处理 DataLoader Torch 中提供了一种帮你整理你的数据结构的好东西, 叫做 DataLoader, 我们能用它来包装自己的数据, 进行批训练. 而且批训练可以有很多种途径
DataLoader
DataLoader 是 torch 给你用来包装你的数据的工具. 所以你要讲自己的 (numpy array 或其他) 数据形式装换成 Tensor, 然后再放进这个包装器中. 使用 DataLoader 有什么好处呢? 就是他们帮你有效地迭代数据, 举例:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 import torchimport torch.utils.data as Datatorch.manual_seed(1 ) BATCH_SIZE = 5 x = torch.linspace(1 , 10 , 10 ) y = torch.linspace(10 , 1 , 10 ) torch_dataset = Data.TensorDataset(x, y) loader = Data.DataLoader( dataset=torch_dataset, batch_size=BATCH_SIZE, shuffle=True , num_workers=2 , ) for epoch in range(3 ): for step, (batch_x, batch_y) in enumerate(loader): print('Epoch: ' , epoch, '| Step: ' , step, '| batch x: ' , batch_x.numpy(), '| batch y: ' , batch_y.numpy()) """ Epoch: 0 | Step: 0 | batch x: [ 6. 7. 2. 3. 1.] | batch y: [ 5. 4. 9. 8. 10.] Epoch: 0 | Step: 1 | batch x: [ 9. 10. 4. 8. 5.] | batch y: [ 2. 1. 7. 3. 6.] Epoch: 1 | Step: 0 | batch x: [ 3. 4. 2. 9. 10.] | batch y: [ 8. 7. 9. 2. 1.] Epoch: 1 | Step: 1 | batch x: [ 1. 7. 8. 5. 6.] | batch y: [ 10. 4. 3. 6. 5.] Epoch: 2 | Step: 0 | batch x: [ 3. 9. 2. 6. 7.] | batch y: [ 8. 2. 9. 5. 4.] Epoch: 2 | Step: 1 | batch x: [ 10. 4. 8. 1. 5.] | batch y: [ 1. 7. 3. 10. 6.] """
可以看出, 每步都导出了5个数据进行学习. 然后每个 epoch 的导出数据都是先打乱了以后再导出.
ImageFolder 1 2 3 from torchvision.datasets import ImageFolderImageFolder(root,transform=None ,target_transform=None ,loader=default_loader)
假设所有的文件按文件夹保存好,每个文件夹下面存贮同一类别的图片,文件夹的名字为分类的名字。
root: 在指定的 root 路径下面寻找图片 transform: 对 PIL Image 进行转换操作,transform 输入是 loader 读取图片返回的对象 target_transform: 对 label 进行变换 loader: 指定加载图片的函数,默认操作是读取 PIL image 对象
实例
1 2 3 from torchvision.datasets import ImageFolderdataset=ImageFolder('data/dogcat_2/' )
输出对应文件夹的 label
1 2 3 print(dataset.class_to_idx)
所有图片的路径和对应的 label
输出图片信息
1 2 3 4 5 6 print(dataset[0 ][1 ]) print(dataset[0 ][0 ])
输出图片大小
1 2 3 4 print(dataset[0 ][0 ].size())
加上 transforms
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 from torchvision.datasets import ImageFolderimport torchfrom torchvision import transformsnormalize=transforms.Normalize(mean=[.5 ,.5 ,.5 ],std=[.5 ,.5 ,.5 ]) transform=transforms.Compose([ transforms.RandomReSizedCrop(224 ), transforms.RandomHorizontalFlip(), transforms.ToTensor(), normalize ]) dataset=ImageFolder('data/dogcat_2/' ,transform=transform) print(dataset[0 ][0 ].size())
最后使用时仍需 DataLoader 包装
1 dataloader = torch.utils.data.DataLoader(dataset, batch_size=opt.batchSize, shuffle=True , num_workers=opt.workers)
图像处理
transforms的二十二个方法
定义自己的数据集
不使用 ImageFolder 来处理定义自己的数据集
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 import osimport torchfrom torch.utils import datafrom PIL import Imageimport numpy as npfrom torchvision import transformstransform=transforms.Compose([ transforms.Resize(224 ), transforms.CenterCrop(224 ), transforms.ToTensor(), transforms.Normalize(mean=[.5 ,.5 ,.5 ],std=[.5 ,.5 ,.5 ]) ]) class DogCat (data.Dataset) : def __init__ (self,root) : imgs=os.listdir(root) self.imgs=[os.path.join(root,k) for k in imgs] self.transforms=transform def __getitem__ (self, index) : img_path=self.imgs[index] label=1 if 'dog' in img_path.split('/' )[-1 ] else 0 pil_img=Image.open(img_path) if self.transforms: data=self.transforms(pil_img) else : pil_img=np.asarray(pil_img) data=torch.from_numpy(pil_img) return data,label def __len__ (self) : return len(self.imgs) dataSet=DogCat('./data/dogcat' ) print(dataSet[0 ])
单张图片 1 2 3 4 5 6 7 8 9 10 11 transform = transforms.Compose([ transforms.Resize(256 ), transforms.CenterCrop(224 ), transforms.ToTensor(), transforms.Normalize([0.485 , 0.456 , 0.406 ], [0.229 , 0.224 , 0.225 ]) ]) im = transform(Image.open('test_image.jpg' )) pred = object_recognition(im.unsqueeze(0 ))
网络搭建 回归 建立数据集
我们创建一些假数据来模拟真实的情况. 比如一个一元二次函数: y = a * x^2 + b, 我们给 y 数据加上一点噪声来更加真实的展示它.
1 2 3 4 5 6 7 8 9 10 11 12 13 import torchfrom torch.autograd import Variableimport matplotlib.pyplot as pltx = torch.unsqueeze(torch.linspace(-1 , 1 , 100 ), dim=1 ) y = x.pow(2 ) + 0.2 *torch.rand(x.size()) x, y = torch.autograd.Variable(x), Variable(y) plt.scatter(x.data.numpy(), y.data.numpy()) plt.show()
建立神经网络
建立一个神经网络我们可以直接运用 torch 中的体系. 先定义所有的层属性 (__init__()), 然后再一层层搭建(forward(x))层于层的关系链接
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 import torchimport torch.nn.functional as F class Net (torch.nn.Module) : def __init__ (self, n_feature, n_hidden, n_output) : super(Net, self).__init__() self.hidden = torch.nn.Linear(n_feature, n_hidden) self.predict = torch.nn.Linear(n_hidden, n_output) def forward (self, x) : x = F.relu(self.hidden(x)) x = self.predict(x) return x net = Net(n_feature=1 , n_hidden=10 , n_output=1 ) print(net) """ Net ( (hidden): Linear (1 -> 10) (predict): Linear (10 -> 1) ) """
训练网络
1 2 3 4 5 6 7 8 9 10 11 12 optimizer = torch.optim.SGD(net.parameters(), lr=0.5 ) loss_func = torch.nn.MSELoss() for t in range(100 ): prediction = net(x) loss = loss_func(prediction, y) optimizer.zero_grad() loss.backward() optimizer.step()
可视化训练过程
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 import matplotlib.pyplot as pltplt.ion() plt.show() for t in range(100 ): ... loss.backward() optimizer.step() if t % 5 == 0 : plt.cla() plt.scatter(x.data.numpy(), y.data.numpy()) plt.plot(x.data.numpy(), prediction.data.numpy(), 'r-' , lw=5 ) plt.text(0.5 , 0 , 'Loss=%.4f' % loss.data[0 ], fontdict={'size' : 20 , 'color' : 'red' }) plt.pause(0.1 )
分类 建立数据集
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 import torchfrom torch.autograd import Variableimport matplotlib.pyplot as pltn_data = torch.ones(100 , 2 ) x0 = torch.normal(2 *n_data, 1 ) y0 = torch.zeros(100 ) x1 = torch.normal(-2 *n_data, 1 ) y1 = torch.ones(100 ) x = torch.cat((x0, x1), 0 ).type(torch.FloatTensor) y = torch.cat((y0, y1), ).type(torch.LongTensor) x, y = Variable(x), Variable(y) plt.scatter(x.data.numpy(), y.data.numpy()) plt.show(
建立神经网络
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 import torchimport torch.nn.functional as F class Net (torch.nn.Module) : def __init__ (self, n_feature, n_hidden, n_output) : super(Net, self).__init__() self.hidden = torch.nn.Linear(n_feature, n_hidden) self.out = torch.nn.Linear(n_hidden, n_output) def forward (self, x) : x = F.relu(self.hidden(x)) x = self.out(x) return x net = Net(n_feature=2 , n_hidden=10 , n_output=2 ) print(net) """ Net ( (hidden): Linear (2 -> 10) (out): Linear (10 -> 2) ) """
训练网络
1 2 3 4 5 6 7 8 9 10 11 12 13 14 optimizer = torch.optim.SGD(net.parameters(), lr=0.02 ) loss_func = torch.nn.CrossEntropyLoss() for t in range(100 ): out = net(x) loss = loss_func(out, y) optimizer.zero_grad() loss.backward() optimizer.step()
可视化训练过程
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 import matplotlib.pyplot as pltplt.ion() plt.show() for t in range(100 ): ... loss.backward() optimizer.step() if t % 2 == 0 : plt.cla() prediction = torch.max(F.softmax(out), 1 )[1 ] pred_y = prediction.data.numpy().squeeze() target_y = y.data.numpy() plt.scatter(x.data.numpy()[:, 0 ], x.data.numpy()[:, 1 ], c=pred_y, s=100 , lw=0 , cmap='RdYlGn' ) accuracy = sum(pred_y == target_y)/200 plt.text(1.5 , -4 , 'Accuracy=%.2f' % accuracy, fontdict={'size' : 20 , 'color' : 'red' }) plt.pause(0.1 ) plt.ioff() plt.show()
快速搭建 我们先看看之前写神经网络时用到的步骤. 我们用 net1 代表这种方式搭建的神经网络.
1 2 3 4 5 6 7 8 9 10 11 12 class Net (torch.nn.Module) : def __init__ (self, n_feature, n_hidden, n_output) : super(Net, self).__init__() self.hidden = torch.nn.Linear(n_feature, n_hidden) self.predict = torch.nn.Linear(n_hidden, n_output) def forward (self, x) : x = F.relu(self.hidden(x)) x = self.predict(x) return x net1 = Net(1 , 10 , 1 )
我们用 class 继承了一个 torch 中的神经网络结构, 然后对其进行了修改, 不过还有更快的一招, 用一句话就概括了上面所有的内容!
1 2 3 4 5 net2 = torch.nn.Sequential( torch.nn.Linear(1 , 10 ), torch.nn.ReLU(), torch.nn.Linear(10 , 1 ) )
我们再对比一下两者的结构:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 print(net1) """ Net ( (hidden): Linear (1 -> 10) (predict): Linear (10 -> 1) ) """ print(net2) """ Sequential ( (0): Linear (1 -> 10) (1): ReLU () (2): Linear (10 -> 1) ) """
我们会发现 net2 多显示了一些内容, 这是为什么呢? 原来他把激励函数也一同纳入进去了, 但是 net1 中, 激励函数实际上是在 forward() 功能中才被调用的. 这也就说明了, 相比 net2, net1 的好处就是, 你可以根据你的个人需要更加个性化你自己的前向传播过程, 比如(RNN). 不过如果不需要七七八八的过程, 相信 net2 这种形式更适合.
保存与提取 我们快速地建造数据, 搭建网络:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 torch.manual_seed(1 ) x = torch.unsqueeze(torch.linspace(-1 , 1 , 100 ), dim=1 ) y = x.pow(2 ) + 0.2 *torch.rand(x.size()) x, y = Variable(x, requires_grad=False ), Variable(y, requires_grad=False ) def save () : net1 = torch.nn.Sequential( torch.nn.Linear(1 , 10 ), torch.nn.ReLU(), torch.nn.Linear(10 , 1 ) ) optimizer = torch.optim.SGD(net1.parameters(), lr=0.5 ) loss_func = torch.nn.MSELoss() for t in range(100 ): prediction = net1(x) loss = loss_func(prediction, y) optimizer.zero_grad() loss.backward() optimizer.step()
接下来我们有两种途径来保存
1 2 torch.save(net1, 'net.pkl' ) torch.save(net1.state_dict(), 'net_params.pkl' )
提取
提取整个神经网络 , 网络大的时候可能会比较慢
这个方法要 import 原来的 pytorch 模型类,或者直接将该类复制回来
1 2 3 4 5 class CNN (nn.Module) : ... net2 = torch.load('net.pkl' ) prediction = net2(x)
只提取网络参数
这个方法会提取所有的参数,然后再放到你的新建网络中
1 2 3 4 5 6 7 8 9 10 11 def restore_params () : net3 = torch.nn.Sequential( torch.nn.Linear(1 , 10 ), torch.nn.ReLU(), torch.nn.Linear(10 , 1 ) ) net3.load_state_dict(torch.load('net_params.pkl' )) prediction = net3(x)
显示结果
1 2 3 4 5 6 7 8 save() restore_net() restore_params()
这样我们能看到三个网络一模一样
优化器 Optimizer 伪数据
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 import torchimport torch.utils.data as Dataimport torch.nn.functional as Fimport matplotlib.pyplot as plttorch.manual_seed(1 ) LR = 0.01 BATCH_SIZE = 32 EPOCH = 12 x = torch.unsqueeze(torch.linspace(-1 , 1 , 1000 ), dim=1 ) y = x.pow(2 ) + 0.1 *torch.normal(torch.zeros(*x.size())) plt.scatter(x.numpy(), y.numpy()) plt.show() torch_dataset = Data.TensorDataset(x, y) loader = Data.DataLoader(dataset=torch_dataset, batch_size=BATCH_SIZE, shuffle=True , num_workers=2 ,)
每个优化器优化一个神经网络
为了对比每一种优化器, 我们给他们各自创建一个神经网络, 但这个神经网络都来自同一个 Net 形式
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 class Net (torch.nn.Module) : def __init__ (self) : super(Net, self).__init__() self.hidden = torch.nn.Linear(1 , 20 ) self.predict = torch.nn.Linear(20 , 1 ) def forward (self, x) : x = F.relu(self.hidden(x)) x = self.predict(x) return x net_SGD = Net() net_Momentum = Net() net_RMSprop = Net() net_Adam = Net() nets = [net_SGD, net_Momentum, net_RMSprop, net_Adam]
优化器 Optimizer
接下来在创建不同的优化器, 用来训练不同的网络. 并创建一个 loss_func 用来计算误差. 我们用几种常见的优化器, SGD, Momentum, RMSprop, Adam.
1 2 3 4 5 6 7 8 9 opt_SGD = torch.optim.SGD(net_SGD.parameters(), lr=LR) opt_Momentum = torch.optim.SGD(net_Momentum.parameters(), lr=LR, momentum=0.8 ) opt_RMSprop = torch.optim.RMSprop(net_RMSprop.parameters(), lr=LR, alpha=0.9 ) opt_Adam = torch.optim.Adam(net_Adam.parameters(), lr=LR, betas=(0.9 , 0.99 )) optimizers = [opt_SGD, opt_Momentum, opt_RMSprop, opt_Adam] loss_func = torch.nn.MSELoss() losses_his = [[], [], [], []]
训练/出图
1 2 3 4 5 6 7 8 9 10 11 12 for epoch in range(EPOCH): print('Epoch: ' , epoch) for step, (b_x, b_y) in enumerate(loader): for net, opt, l_his in zip(nets, optimizers, losses_his): output = net(b_x) loss = loss_func(output, b_y) opt.zero_grad() loss.backward() opt.step() l_his.append(loss.data.numpy())
SGD 是最普通的优化器, 也可以说没有加速效果, 而 Momentum 是 SGD 的改良版, 它加入了动量原则. 后面的 RMSprop 又是 Momentum 的升级版. 而 Adam 又是 RMSprop 的升级版. 不过从这个结果中我们看到, Adam 的效果似乎比 RMSprop 要差一点. 所以说并不是越先进的优化器, 结果越佳. 我们在自己的试验中可以尝试不同的优化器, 找到那个最适合你数据/网络的优化器
卷积神经网络 MNIST手写数据
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 import torchimport torch.nn as nnimport torch.utils.data as Dataimport torchvision import matplotlib.pyplot as plttorch.manual_seed(1 ) EPOCH = 1 BATCH_SIZE = 50 LR = 0.001 DOWNLOAD_MNIST = True train_data = torchvision.datasets.MNIST( root='./mnist/' , train=True , transform=torchvision.transforms.ToTensor(), download=DOWNLOAD_MNIST, )
同样, 我们除了训练数据, 还给一些测试数据, 测试看看它有没有训练好
1 2 3 4 5 6 7 8 test_data = torchvision.datasets.MNIST(root='./mnist/' , train=False ) train_loader = Data.DataLoader(dataset=train_data, batch_size=BATCH_SIZE, shuffle=True ) test_x = torch.unsqueeze(test_data.test_data, dim=1 ).type(torch.FloatTensor)[:2000 ]/255. test_y = test_data.test_labels[:2000 ]
CNN模型
和以前一样, 我们用一个 class 来建立 CNN 模型. 这个 CNN 整体流程是 卷积(Conv2d) -> 激励函数(ReLU) -> 池化, 向下采样 (MaxPooling) -> 再来一遍 -> 展平多维的卷积成的特征图 -> 接入全连接层 (Linear) -> 输出
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 class CNN (nn.Module) : def __init__ (self) : super(CNN, self).__init__() self.conv1 = nn.Sequential( nn.Conv2d( in_channels=1 , out_channels=16 , kernel_size=5 , stride=1 , padding=2 , ), nn.ReLU(), nn.MaxPool2d(kernel_size=2 ), ) self.conv2 = nn.Sequential( nn.Conv2d(16 , 32 , 5 , 1 , 2 ), nn.ReLU(), nn.MaxPool2d(2 ), ) self.out = nn.Linear(32 * 7 * 7 , 10 ) def forward (self, x) : x = self.conv1(x) x = self.conv2(x) x = x.view(x.size(0 ), -1 ) output = self.out(x) return output cnn = CNN() print(cnn) """ CNN ( (conv1): Sequential ( (0): Conv2d(1, 16, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2)) (1): ReLU () (2): MaxPool2d (size=(2, 2), stride=(2, 2), dilation=(1, 1)) ) (conv2): Sequential ( (0): Conv2d(16, 32, kernel_size=(5, 5), stride=(1, 1), padding=(2, 2)) (1): ReLU () (2): MaxPool2d (size=(2, 2), stride=(2, 2), dilation=(1, 1)) ) (out): Linear (1568 -> 10) ) """
训练
下面我们开始训练, 将 x y 都用 Variable 包起来, 然后放入 cnn 中计算 output, 最后再计算误差. 下面代码省略了计算精确度 accuracy 的部分
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 optimizer = torch.optim.Adam(cnn.parameters(), lr=LR) loss_func = nn.CrossEntropyLoss() for epoch in range(EPOCH): for step, (b_x, b_y) in enumerate(train_loader): output = cnn(b_x) loss = loss_func(output, b_y) optimizer.zero_grad() loss.backward() optimizer.step() """ ... Epoch: 0 | train loss: 0.0306 | test accuracy: 0.97 Epoch: 0 | train loss: 0.0147 | test accuracy: 0.98 Epoch: 0 | train loss: 0.0427 | test accuracy: 0.98 Epoch: 0 | train loss: 0.0078 | test accuracy: 0.98 """
最后我们再来取10个数据, 看看预测的值到底对不对:
1 2 3 4 5 6 7 8 9 test_output = cnn(test_x[:10 ]) pred_y = torch.max(test_output, 1 )[1 ].data.numpy().squeeze() print(pred_y, 'prediction number' ) print(test_y[:10 ].numpy(), 'real number' ) """ [7 2 1 0 4 1 4 9 5 9] prediction number [7 2 1 0 4 1 4 9 5 9] real number """
网络优化方法 1. Dropout 做点数据
自己做一些伪数据, 用来模拟真实情况. 数据少, 才能凸显过拟合问题, 所以我们就做10个数据点
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 import torchimport matplotlib.pyplot as plttorch.manual_seed(1 ) N_SAMPLES = 20 N_HIDDEN = 300 x = torch.unsqueeze(torch.linspace(-1 , 1 , N_SAMPLES), 1 ) y = x + 0.3 *torch.normal(torch.zeros(N_SAMPLES, 1 ), torch.ones(N_SAMPLES, 1 )) test_x = torch.unsqueeze(torch.linspace(-1 , 1 , N_SAMPLES), 1 ) test_y = test_x + 0.3 *torch.normal(torch.zeros(N_SAMPLES, 1 ), torch.ones(N_SAMPLES, 1 )) plt.scatter(x.data.numpy(), y.data.numpy(), c='magenta' , s=50 , alpha=0.5 , label='train' ) plt.scatter(test_x.data.numpy(), test_y.data.numpy(), c='cyan' , s=50 , alpha=0.5 , label='test' ) plt.legend(loc='upper left' ) plt.ylim((-2.5 , 2.5 )) plt.show()
搭建神经网络
我们在这里搭建两个神经网络, 一个没有 dropout, 一个有 dropout. 没有 dropout 的容易出现 过拟合, 那我们就命名为 net_overfitting, 另一个就是 net_dropped. torch.nn.Dropout(0.5) 这里的 0.5 指的是随机有 50% 的神经元会被关闭/丢弃.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 net_overfitting = torch.nn.Sequential( torch.nn.Linear(1 , N_HIDDEN), torch.nn.ReLU(), torch.nn.Linear(N_HIDDEN, N_HIDDEN), torch.nn.ReLU(), torch.nn.Linear(N_HIDDEN, 1 ), ) net_dropped = torch.nn.Sequential( torch.nn.Linear(1 , N_HIDDEN), torch.nn.Dropout(0.5 ), torch.nn.ReLU(), torch.nn.Linear(N_HIDDEN, N_HIDDEN), torch.nn.Dropout(0.5 ), torch.nn.ReLU(), torch.nn.Linear(N_HIDDEN, 1 ), )
训练
训练的时候, 这两个神经网络分开训练. 训练的环境都一样
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 optimizer_ofit = torch.optim.Adam(net_overfitting.parameters(), lr=0.01 ) optimizer_drop = torch.optim.Adam(net_dropped.parameters(), lr=0.01 ) loss_func = torch.nn.MSELoss() for t in range(500 ): pred_ofit = net_overfitting(x) pred_drop = net_dropped(x) loss_ofit = loss_func(pred_ofit, y) loss_drop = loss_func(pred_drop, y) optimizer_ofit.zero_grad() optimizer_drop.zero_grad() loss_ofit.backward() loss_drop.backward() optimizer_ofit.step() optimizer_drop.step()
对比测试结果
在这个 for 循环里, 我们加上画测试图的部分. 注意在测试时, 要将网络改成 eval() 形式, 特别是 net_dropped, net_overfitting 改不改其实无所谓. 画好图再改回 train() 模式
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 ... optimizer_ofit.step() optimizer_drop.step() if t % 10 == 0 : net_overfitting.eval() net_dropped.eval() ... test_pred_ofit = net_overfitting(test_x) test_pred_drop = net_dropped(test_x) ... net_overfitting.train() net_dropped.train()
2. Batch Normalization 批标准化通俗来说就是对每一层神经网络进行标准化 (normalize) 处理, 我们知道对输入数据进行标准化能让机器学习有效率地学习. 如果把每一层后看成这种接受输入数据的模式, 那我们何不 “批标准化” 所有的层呢?
做点数据
自己做一些伪数据, 用来模拟真实情况. 而且 Batch Normalization (之后都简称BN) 还能有效的控制坏的参数初始化 (initialization), 比如说 ReLU 这种激励函数最怕所有的值都落在附属区间, 那我们就将所有的参数都水平移动一个 -0.2 (bias_initialization = -0.2), 来看看 BN 的实力.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 import torchfrom torch import nnfrom torch.nn import initimport torch.utils.data as Dataimport torch.nn.functional as Fimport matplotlib.pyplot as pltimport numpy as npN_SAMPLES = 2000 BATCH_SIZE = 64 EPOCH = 12 LR = 0.03 N_HIDDEN = 8 ACTIVATION = F.tanh B_INIT = -0.2 x = np.linspace(-7 , 10 , N_SAMPLES)[:, np.newaxis] noise = np.random.normal(0 , 2 , x.shape) y = np.square(x) - 5 + noise test_x = np.linspace(-7 , 10 , 200 )[:, np.newaxis] noise = np.random.normal(0 , 2 , test_x.shape) test_y = np.square(test_x) - 5 + noise train_x, train_y = torch.from_numpy(x).float(), torch.from_numpy(y).float() test_x = torch.from_numpy(test_x).float() test_y = torch.from_numpy(test_y).float() train_dataset = Data.TensorDataset(train_x, train_y) train_loader = Data.DataLoader(dataset=train_dataset, batch_size=BATCH_SIZE, shuffle=True , num_workers=2 ,) plt.scatter(train_x.numpy(), train_y.numpy(), c='#FF9359' , s=50 , alpha=0.2 , label='train' ) plt.legend(loc='upper left' ) plt.show()
搭建神经网络
这里就教你如何构建带有 BN 的神经网络的. BN 其实可以看做是一个 layer (BN layer). 我们就像平时加层一样加 BN layer 就好了. 注意, 我还对输入数据进行了一个 BN 处理, 因为如果你把输入数据看出是 从前面一层来的输出数据, 我们同样也能对她进行 BN.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 class Net (nn.Module) : def __init__ (self, batch_normalization=False) : super(Net, self).__init__() self.do_bn = batch_normalization self.fcs = [] self.bns = [] self.bn_input = nn.BatchNorm1d(1 , momentum=0.5 ) for i in range(N_HIDDEN): input_size = 1 if i == 0 else 10 fc = nn.Linear(input_size, 10 ) setattr(self, 'fc%i' % i, fc) self._set_init(fc) self.fcs.append(fc) if self.do_bn: bn = nn.BatchNorm1d(10 , momentum=0.5 ) setattr(self, 'bn%i' % i, bn) self.bns.append(bn) self.predict = nn.Linear(10 , 1 ) self._set_init(self.predict) def _set_init (self, layer) : init.normal_(layer.weight, mean=0. , std=.1 ) init.constant_(layer.bias, B_INIT) def forward (self, x) : pre_activation = [x] if self.do_bn: x = self.bn_input(x) layer_input = [x] for i in range(N_HIDDEN): x = self.fcs[i](x) pre_activation.append(x) if self.do_bn: x = self.bns[i](x) x = ACTIVATION(x) layer_input.append(x) out = self.predict(x) return out, layer_input, pre_activation nets = [Net(batch_normalization=False ), Net(batch_normalization=True )]
训练
1 2 3 4 5 6 7 8 9 10 11 12 13 14 opts = [torch.optim.Adam(net.parameters(), lr=LR) for net in nets] loss_func = torch.nn.MSELoss() losses = [[], []] for epoch in range(EPOCH): print('Epoch: ' , epoch) for step, (b_x, b_y) in enumerate(train_loader): for net, opt in zip(nets, opts): pred, _, _ = net(b_x) loss = loss_func(pred, b_y) opt.zero_grad() loss.backward() opt.step()
画图
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 f, axs = plt.subplots(4 , N_HIDDEN+1 , figsize=(10 , 5 )) def plot_histogram (l_in, l_in_bn, pre_ac, pre_ac_bn) : ... for epoch in range(EPOCH): layer_inputs, pre_acts = [], [] for net, l in zip(nets, losses): net.eval() pred, layer_input, pre_act = net(test_x) l.append(loss_func(pred, test_y).data[0 ]) layer_inputs.append(layer_input) pre_acts.append(pre_act) net.train() plot_histogram(*layer_inputs, *pre_acts) for step, (b_x, b_y) in enumerate(train_loader): ...
GPU 训练 我们定义一个辅助函数,以便在有 GPU 时选择 GPU 为目标设备,否则就默认选择 CPU。
1 2 3 4 5 6 def get_default_device () : """Pick GPU if available, else CPU""" if torch.cuda.is_available(): return torch.device('cuda' ) else : return torch.device('cpu' )
1 2 3 device = get_default_device() print(device)
CUDA memory error
lower resolution, though hurt performance
use gradient accumulation to get a larger batch size
duly use empty_cache or use other methods to manage memory finely
use pytorch checkpoint to run partial model at once
多 GPU 训练
1 2 3 4 import torch.nn as nnmodel=nn.DataParallel(model,device_ids=[0 ,1 ,2 ]) model=nn.DataParallel(model)
函数 维度调整 1 2 3 4 5 6 7 8 9 10 11 12 13 14 import numpy as npimport torcha = np.arange(24 ).reshape(2 ,3 ,4 ) b = a[:,-1 ,:] print(b.shape) x = torch.from_numpy(a) y = x[:,-1 ,:].unsqueeze(1 ) print(y.size()) z = y.expand(2 ,4 ,4 ) print(z.size())
expand
扩展某个size为1的维度。如(2,2,1)扩展为(2,2,3)
1 2 3 4 5 import torchx=torch.randn(2 ,2 ,1 ) print(x) y=x.expand(2 ,2 ,3 ) print(y)
输出:
1 2 3 4 5 6 7 8 9 10 11 12 tensor([[ 0.2000 , 0.3000 , 0.2000 ], [ 1.3000 , 1.3000 , 1.3000 ], [ 2.3000 , 2.3000 , 2.3000 ], [ 3.2000 , 3.2000 , 3.1000 ]]) tensor([[ 1.1000 , 2.2000 , 1.3000 ], [ 2.1000 , 2.2000 , 2.3000 ], [ 2.1000 , 2.2000 , 2.3000 ], [ 1.1000 , 1.2000 , 0.3000 ]]) tensor([[ 0.2000 ], [ 1.3000 ], [ 2.1000 ], [ 3.2000 ]])
squeeze
将维度为1的压缩掉。如size为(3,1,1,2),压缩之后为(3,2)
1 2 3 4 import torcha=torch.randn(2 ,1 ,1 ,3 ) print(a) print(a.squeeze())
输出:
1 2 3 4 5 6 tensor([[[[-0.2320 , 0.9513 , 1.1613 ]]], [[[ 0.0901 , 0.9613 , -0.9344 ]]]]) tensor([[-0.2320 , 0.9513 , 1.1613 ], [ 0.0901 , 0.9613 , -0.9344 ]])
unsqueeze(n)
在第 n 个位置增加一维,如 (2,3) 在 unsqueeze(1) 后为 (2,1,3)
max
返回最大值,或指定维度的最大值以及 index
argmax
返回最大值的 index
pytorch之expand,gather,squeeze,sum,contiguous,softmax,max,argmax
错误汇总
Pytorch 错误汇总
1 Expected stride to be a single integer value or a list of 1 values to match the convolution dimensions, but got stride=[1 , 1 ]
model 输入 tensor 错误,形状应为 batch, c, w, h
1 AttributeError: Can't get attribute 'Net ' on <module '__main__'>
在导入模型的时候没有把类的定义添加或者 import 到加载模型的这个 py 文件中
1 Expected more than 1 value per channel when training, got input size torch.Size([1 , 512 , 1 , 1 ])
可能是输入批次只有一个数据点,而由于BatchNorm操作需要多于一个数据计算平均值,因此造成该错误。
解决方法:
改变(增大) batchsize
在获取数据集时,将DataLoader中drop_last设置为True。
把不够一个批次的数据丢弃。